Продолжение, начало здесь
Сложностей одевания колес на ось редуктора, я думаю возникнуть не должно. После того, как конденсаторы припаяны (см. предыдущюю статью) и колёса надеты на оси, необходимо приклеить полоску двухстороннего скотча — 1,5-2 см к месту крепления редуктора и основания шасси. Тоже самое проделать со вторым редуктором, и установить их на свои места.

Приклеиваем редукторы с колёсами к основанию шасси
2. Крепление ролика к основанию шасси

Прикретить ролик к основанию, или прекрипить с помощью винтов
Мебельный ролик, может быть в принципе любым, просто он должен соотноситься по высоте к высоте колёс, чтобы шасси получилось более или менее горизонтальным, но вращаться он должен свободно во всех направлениях, чтобы после сборки, не стать якорем. Наш ролик мы закрепили на основании проделав пару дырок в крышке, а с другой строны для надежности установили металлическую пластину, но шайбы тоже подойдут.
3. Установка двигателей
См. рис 1. ( в начале страницы ).
Место крепления редуктора двигателя к основанию шасси, мы слегка зачистили шкуркой, для того, чтобы поверхность стало немного матовой, менее скользкой, для более надежного соединения.
4. Собираем серво мотор

Серво мотор SG90 для мини робота
Маленькое, но довольно надежное серво SG90, будет служить нашему микро роботу шеей, на которой будут закреплены глаза — ультразвуковой датчик (измеряет расстояние с помощью эхолокации). В комплекте с сервоприводом идут «рога», для удобства крепления различных рычажных механизмов с валом двигателя. При первом надевании рогов, придётся, с осторожностью, применить небольшие усилия, но говорю ещё раз, с осторожностью! К основанию приклеиваем полоску двухстороннего скотча.

Ультразвуковой сенсор приклеиваем к подвижному основанию сервы
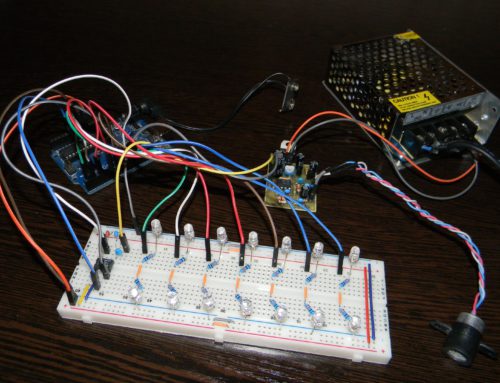
5. Плата управления двигателями
Существует множество разновидностей плат управления двигателями, отличаются они мощностью, подключаемых двигателей. РИСУНОК Количеством подключаемых двигателей и пр. Наш вариант — Motor Drive Shield — позволяет одновременно управлять четырьмя двигателями и двумя серво двигателями, а также развязать (отделить) питание двигателей от питания Arduino UNO. Еще у неё на плате присутствует шесть портов для подключения различных датчиков ( правда эти порты могут быть не распаяны — как паять можно посмотреть здесь). В нашем случае мы распаяли два порта — A4 и A5, они нам понадобятся для подключения Ультразвукового эхо-локатора, см. блок диограмму на предыдущем уроке.

Плата управления двигателями и сервоприводом
6. Соединяем плату управления двигателями и Arduino Uno
Плата управления на нижней части имеет ряд штырей — разъёмов, они нужны для того чтобы соединить такие же порты на верхней части Arduino Uno. Аккуратно и точно совмещаем их, и с не большим усилием сдавливаем, чтобы штыри вошли в гнёзда ардуины.

Соединяем плату управления двигателями с платой Arduino UNO
7. Крепим платы и батарейный отсек к основанию робота
 с приклеинными платами управления")
Вид Шасси (крышки) с приклеинными платами управления
Размещаем на верхней стороне нашего основания (шасси) два модуля соединенных между собой — Arduino и Motor Shield и батарейный отсек,в нашем случае блок аккумуляторов. Аккуратно приклеиваем с помощью двух полосок, двухстороннего скотча. В зависимости от размера вашего пищевого контейнера-шасси, батарейный блок может слегка выступать за пределы основания. А если бортик слегка мешает, то скотча возможно понадобится 2-3 слоя.

С помощью двухстороннего скотча приклеиваем батарейный отсек
Также приклеиваем модули управления роботом.
8. Устанавливаем сенсор и серво-мотор

Соединяем ультразвуковой датчик с платой ардуино
Приклеив пару слоев двухстороннего скотча на нижнюю часть ультразвукового датчика HC-SR04, мы как бы получим ровную поверхность для того чтобы приклеить датчик на рога- пропеллер сервопривода. Убедитесь, что четыре контакта разъема направлен вверх, прижмите датчик к сервоприводу. На нижнее основание SG90 приклейте полоску двухстороннего скотча. *Лента скотч должна быть мягкой, толщиной примерно 1-1,5 мм. Затем аккуратно приклейте получившуюся конструкцию на шасси основание, поперёк сервомотором, в районе поворотного колеса, в передней части робота. Подключите серво привод, согласно блок схемы. Как правило, провод управления сервопривода оранжевого цвета, обозначается латинской буквой «S».
9. Подключение батареи и моторов
Продолжение следует…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Подскажите как к данной модели подключить датчики линии и приближения?