Для Arduino существует огромное количество датчиков и сенсоров.

Набор датчиков для Arduino
В данной статье речь идёт о ИК-датчике приближения на Arduino и инфракрасных диодах (IR Led). Изменения и дополнения. См. начало
Статья, опубликованная ранее на страницах нашего сайта, мягко говоря не совсем удачная, она была черновиком и не знаю как выплыла в онлайн, удалять — поздно, поэтому — дополнения
Вот принципиальная схема этого проекта

Простой датчик приближения на Arduino — схема
Резистор лучше взять 200кОм
ИК диод передатчик — 4шт.
ИК диод приемник — 1шт.
Вот код для проверки работы схемы:
IR proximity sensor — скетч для Arduino UNO
int IRpin = A0; // IR photodiode on analog pin A0
int IRemitter = 2; // IR emitter LED on digital pin 2
int ambientIR; // variable to store the IR coming from the ambient
int obstacleIR; // variable to store the IR coming from the object
int value
int distance; // variable that will tell if there is an obstacle or not
void setup(){
Serial.begin(9600); // initializing Serial monitor
pinMode(IRemitter,OUTPUT); // IR emitter LED on digital pin 2
digitalWrite(IRemitter,LOW);// setup IR LED as off
pinMode(11,OUTPUT); // buzzer in digital pin 11
}
void loop(){
distance = readIR(5); // calling the function that will read the distance and passing the «accuracy» to it
Serial.println(distance); // writing the read value on Serial monitor
buzzer(); // uncomment to activate the buzzer function
}
int readIR(int times){
for(int x=0;x<times;x++)
{
digitalWrite(IRemitter,LOW); // turning the IR LEDs off to read the IR coming from the ambient
delay(1); // minimum delay necessary to read values
ambientIR = analogRead(IRpin); // storing IR coming from the ambient
digitalWrite(IRemitter,HIGH); // turning the IR LEDs on to read the IR coming from the obstacle
delay(1); // minimum delay necessary to read values
obstacleIR = analogRead(IRpin); // storing IR coming from the obstacle
value[x] = ambientIR-obstacleIR; // calculating changes in IR values and storing it for future average
}
for(int x=0;x<times;x++)
{ // calculating the average based on the «accuracy»
distance+=value[x];
}
return(distance/times); // return the final value
}
//— Function to sound a buzzer for audible measurements —//
void buzzer(){
if (distance>1){
if(distance>100){ // continuous sound if the obstacle is too close
digitalWrite(11,HIGH);
}
else{ // beeps faster when an obstacle approaches
digitalWrite(11,HIGH);
delay(150-distance); // adjust this value for your convenience
digitalWrite(11,LOW);
delay(150-distance); // adjust this value for your convenience
}
}
else{ // off if there is no obstacle
digitalWrite(11,LOW);
}
}
//end
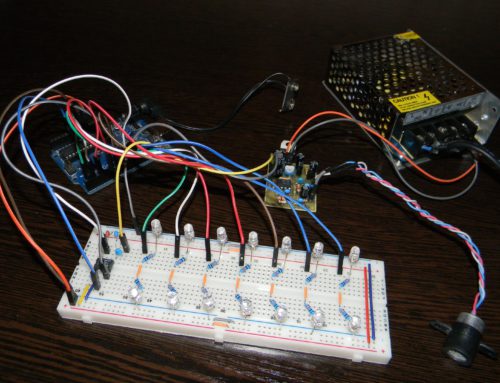
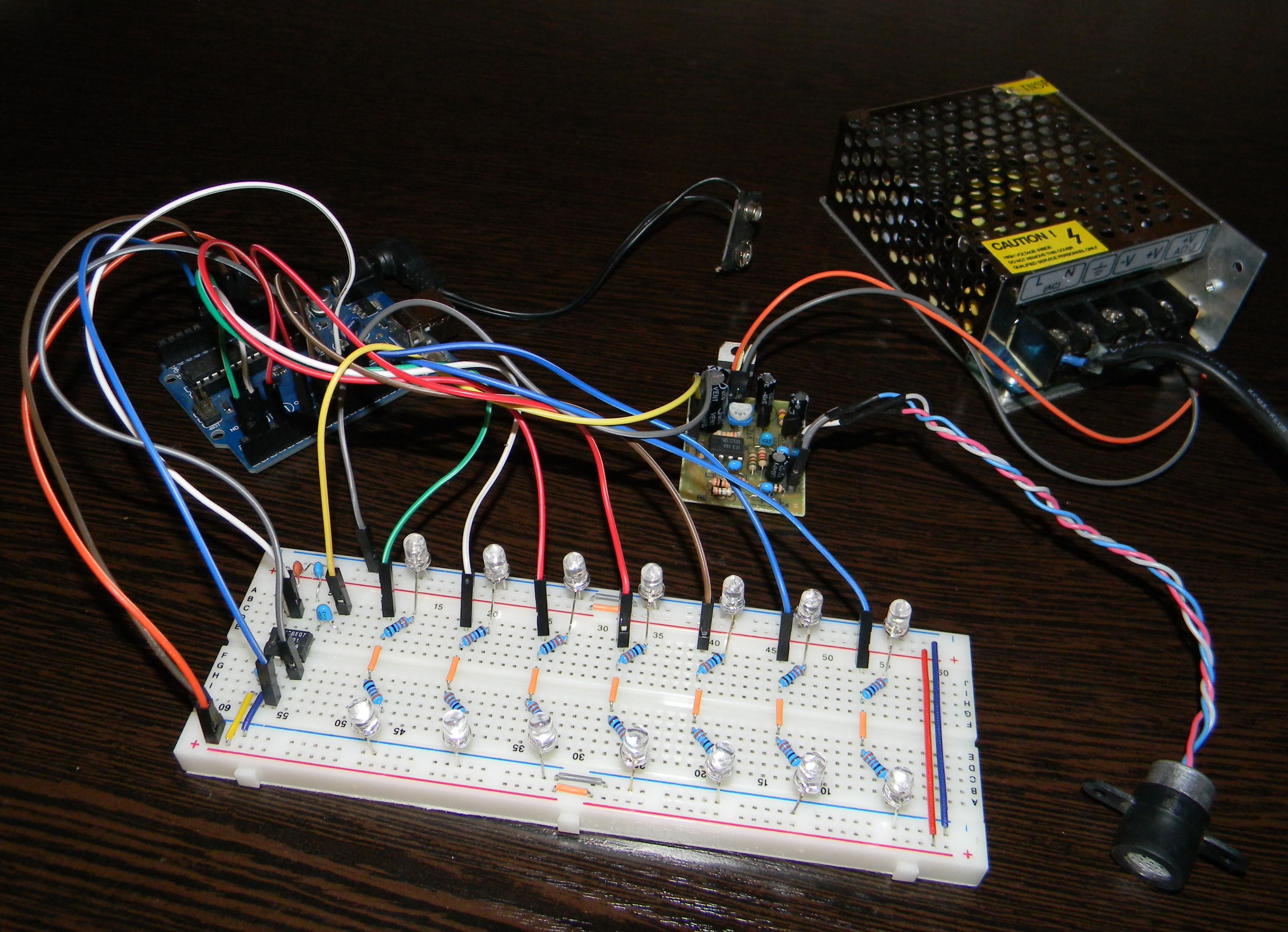
Вид рабочего варианта IR proximity sensor (приёмник — передатчик на Arduino и инфракрасных светодиодах.

IR-proximity-sensor — Датчик приближения на Arduino

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Оставить комментарий