/*
*
* Набор для экспериментов ArduinoKit
* Код программы для опыта №12: sketch 12
*
* Крутись мотор
*
* Написано для сайта http://arduinokit.ru
*
*
* Помощь сообщества Arduino.
* Посетите сайт http://www.arduino.cc
*
*
*
* КРУТИСЬ МОТОР. ARDUINO И ЭЛЕКТРОДВИГАТЕЛЬ.
*
* Использование транзистора для управления скоростью мотора.
* Мы также покажем вам, как вводить данные через последовательный порт
* (см функцию serialSpeed() ниже).
*
* Двигатели одна из многочисленных вещей из нашей повседневной жизни,
* и Arduino может ими управлять. Мы будем использовать Широтно
* Импульсную Модуляцию (PWM) для управления скоростью двигателя.
*
* Порты Arduino способны выдержать работу нескольких светодиодов
* (до 40 мА), но они не достаточно мощны, чтобы справиться с нагрузкой
* от двигателя и других прожорливых потребителей энергии. Двигатель
* идущий в наборе потребляет приблизительно от 50 до 100 mA, а это
* значительно больше чем может дать Arduino. Поэтому мы будем
* использовать транзистор, который выполнит главную работу.
* Транзистор будет выполнять роль «твердотельного выключателя», мы
* «дадим» ему ток маленькой величины, а будет коммутировать, гораздо
* больший ток. Транзистор 2N2222 может коммутировать ток до 200 мА.
*
* Вы можете управлять транзистором с помощью функции digitalWrite()
* («включать» и «выключать»), а с помощью функцию analogWrite()
* изменять скорость вращения двигателя, для этого Arduino использует
* Широтно Импульсную Модуляцию (PWM), подавая импульсы напряжения
* изменяя их ширину от 0% до 100%.
*
* Имейте в виду, для уменьшения скорости, вы уменьшаете ее с помощью
* ШИМ (делая паузы «СТОП» длиннее). Если в начале, длительность паузы
* будет 50% и более, двигатель, просто не сможет раскрутиться,
* поэтому при старте необходимо немного добавить скорости.
*
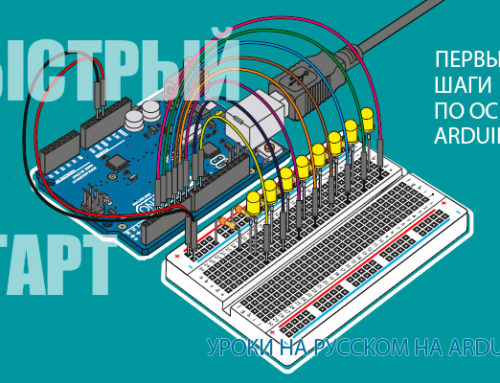
* Подсоединяем оборудование:
*
* Транзистор:
*
* У транзистора имеются три вывода. Если повернуть его скошенной
* стороной (с надписями) к себе, а выводами вниз, то назначения
* выводов будут следующими (слева на пр.): КОЛЛЕКТОР, БАЗА, ЭМИТЕР.
*
* Подсоедините минусовой вывод мотора к КОЛЛЕКТОРУ транзистора.
* Подсоедините БАЗУ через резистор 330 Ом к цифровому порту 9.
*Подсоедините ЭМИТЕР к GND (минусовой шине).
*
* Мотор:
*
* Вы уже должны были подсоединить минусовой вывод мотора к
*КОЛЛЕКТОРУ транзистора.
*
* В данном опыте не имеет большого значения как подсоединять плюс
* или минус двигателя, если их перепутать двигатель просто будет
* крутиться в обратном направлении, это будет иметь значение если
* двигатель установлен в машинке, и вместо того, чтобы ехать вперед,
* она поедет назад.
*
* Оставшийся вывод мотора подсоедините к +5 Вольт.
*
* Полупроводниковый диод:
*
* Полупроводниковый диод пропускает электрический ток только в
* одном направлении и блокирует его прохождение в другом.
*
* Когда двигатель вращается, и резко отключается, магнитное поле
* внутри него падает, в результате создается всплеск напряжения.
* Это может привести к повреждению транзистора. Чтобы этого не
* случилось, мы и будем использовать диод, который не пропустит
* этот всплеск через себя.
*
* На импортных диодах, почти всегда, КАТОД, отмечен полоской —
* кольцом, расположенным, как раз у этого вывода.
*
* Подключите один вывод диода (КАТОД) к +5 Вольт, а другой
* вывод (АНОД) к минусовому контакту на двигателе.
*
* В данном опыте не имеет большого значения плюс или минус
* двигателя, если их перепутать двигатель просто будет крутиться в
* обратном направлении, это будет иметь значение если двигатель
* установлен в машинке, и вместо того, чтобы ехать вперед, она
* поедет назад.
*
*
* Комментарий к программе написан
* 23 ноября 2014
* специально для http://arduinokit.ru
*
*/
// Будем управлять двигателем используя цифровой порт 9 (pin 9).
// Это должен быть любой ШИМ порт Arduino
const int motorPin = 9;
void setup()
{
// Установим порт мотора как выходной:
pinMode(motorPin, OUTPUT);
// Активируем «Монитор порта»:
Serial.begin(9600);
}
void loop()
{
// Здесь мы использовали комментарии для отключения некоторых
// примеров. Чтобы испробовать другой пример, раскомментируйте
// одну из следующих строк и закомментируйте другие. См функции,
// для того чтобы узнать что они делают и как работают.
// motorOnThenOff();
// motorOnThenOffWithSpeed();
// motorAcceleration();
serialSpeed();
}
// Попробуйте разные значения.
void motorOnThenOff()
{
int onTime = 3000; // миллисекунд для вращения мотора
int offTime = 3000; // миллисекунд для простаивания мотора
digitalWrite(motorPin, HIGH); // включить мотор — максимальная скорость
delay(onTime); // задержка, для продолжения вращения
digitalWrite(motorPin, LOW); // выключить мотор
delay(offTime); // задержка, для простаивания мотора
}
// Функция «motorOnThenOffWithSpeed» переключает работу мотора между
// двумя скоростями. Пробуйте разные значения, если интересно.
void motorOnThenOffWithSpeed()
{
int Speed1 = 200; // скорость «Speed1» 0 (остановка), 255 (полный ход)
int Time1 = 3000; // время «Time1» в миллисекундах
int Speed2 = 50; // скорость «Speed2» 0 (остановка), 255 (полный ход)
int Time2 = 3000; // время «Time2» в миллисекундах
analogWrite(motorPin, Speed1); // включаем мотор на скорости «Speed1»
delay(Time1); // продолжаем вращение заданное время
analogWrite(motorPin, Speed2); // включаем мотор на скорость «Speed2»
delay(Time2); // продолжаем, заданное время «Time2»
}
// Функция «motorAcceleration» раскручивает двигатель от нуля до
// максимума, и обратно до полной остановки.
void motorAcceleration()
{
int speed;
int delayTime = 20; // пауза в миллисекундах
// будем раскручивать мотор, увеличивая скорости от 0 до 255 с паузой в
// 20 миллисекунд меду каждым шагом (1, пауза, 2, пауза, 3, пауза и.т.д)
for(speed = 0; speed <= 255; speed++) // шаг, увеличение на единицу
{
analogWrite(motorPin,speed); // установка новой скорости
delay(delayTime); // пауза «delayTime», т.е 20 миллисекунд
}
// будем останавливать мотор, уменьшая скорость от 255 до 0 с паузой в
// 20 миллисекунд меду каждым шагом (255, пауза, 254, пауза, 253, пауза …)
for(speed = 255; speed >= 0; speed—)
{
analogWrite(motorPin,speed); // установка новой скорости
delay(delayTime); // пауза «delayTime», т.е 20 миллисекунд
}
}
// Следующая функция позволит вам изменять скорость прямо в окне
// «Монитора порта». Для этого откройте Монитор порта, используя
// значок увеличительного стекла в Arduino IDE, в правом верхнем
// углу окна. Затем введите желаемую скорость в специальном месте
// для ввода текста «Type a speed (0-255) into the box above,», в
// верхней части окна, и нажмите кнопку «Send» (отправить) или
// «return» (возврат). Двигатель будет работать на заданной вами
// скорости. Допустимый диапазон от 0 до 255.
void serialSpeed()
{
int speed;
Serial.println(«Type a speed (0-255) into the box above,»);
// Т.к. с русским языком в «мониторе порта» существуют некоторые
// сложности, надписи будут на английском.
Serial.println(«then click [send] or press [return]»);
Serial.println(); // Распечатать пустую строку
// In order to type out the above message only once,
// we’ll run the rest of this function in an infinite loop:
// Для того, чтобы вывести сообщение (выше) лишь один раз,
// Мы будем запускать остальную часть этой функции в
// бесконечном цикле:
// Вывод запроса данных осуществляется лишь раз, после этого
// Функция будет проверять правильность ввода данных по кругу, пока
// данные не изменятся.
while(true)
{
// Сначала мы проверяем, доступны ли входные данные:
while (Serial.available() > 0)
{
// Если данные есть, выполняем parseInt() для считывания цифр:
speed = Serial.parseInt();
// Поскольку analogWrite() работает с числами от 0 до 255,
// мы обязательно должны быть уверенны, что число входит в
// заданный диапазон. Для этого воспользуемся функцией «constrain».
// об этой функции мы говорили в опыте №6 «Arduino и Фоторезистор»:
speed = constrain(speed, 0, 255);
// Напечатать сообщение для того, чтобы вы знали что число
// было получено:
Serial.print(«Setting speed to «);
Serial.println(speed);
// И в конце зададим скорость двигателя
analogWrite(motorPin, speed);
}
}
}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ох и сложно было новичку запустить ))) Пока понял что нужно и что не нужно комментировать, чуть не застрелился )) Однако в итоге запустил таки. Правда транзистор влепил «что было» 814Г и он при указанных номиналах не закрывается полностью. На бОльшее ума не хватает. Подскажите пожалуйста, как правильно расчитать номинал резистора под имеющийся транзистор (просто из-за одного транзистора лень ехать в магазин)? Хочу плавно запускать 12В коллекторный двигатель от принтера.
Александр — лень это общественный двигатель прогресса !!!
Попробуй привязать базу транзистора через резистор 2-10 кОм к земле. он должен закрываться полностью.
Рассчитать номинал резистора можно следующим образом. ток коллектора равен току базы умноженному на коэфф. усиления транзистора , (а он равен пять или десять , , край двадцать пять твоем случае) .
то есть если мотор потребляет 500 мА — то транзюку в базу нужно загнать 50 мА при коэф.К =10, а при К=25 ток .базы д.б. 20 мА. Теперь считаем на выходе Ардуино ключа напряжение +5В . И оно состоит из падения напряжение на резисторе неизвестном и плюс падение 0,6-,0,8 В. на база-эммитерном переходе транзистора. Тгда +5В — (0,6-0,8)В = (4,4-4,2)В. Ток в базу мы определили с тобой и он равен 25 мА.
Теперь разделим напряжение на резисторе на ток и получим номинал резистора. 4,2/0,025=168 . Выбираем резистор номиналом от 220 Ом до 110 Ом.
Теперь нужно проверить по мощности (выбрать ваттность резистора чтобы он не сгрел. по формуле U*I=P/
Проверяем 4,2*0,025= 0,105 Вт . выбираем 0,125 ватта или 0,25 ватта. Все
Е .
[…] Скачать код к опыту 12. Скетч и подробное описание (Обязательно прочтите весь скетч! Он подробно описан здесь): […]